
Wastewater treatment plants (WWTPs) produce gaseous emissions that might be olfactory annoying to the surrounding population. Current odour assessment methodologies are based on costly and infrequent olfactometry measurements involving human panels, and continuous monitoring of few gases via fixed gas detectors installed on the plant.
This leads to odour measurements with low temporal and spatial resolution, hindering an accurate characterization of the odour episodes. The main goal of the SNIFFDRONE project, presented in this paper, is to develop a drone with olfaction capabilities to acquire spatially-dense odour measurements and localize the source of odour nuisances in WWTPs.
Competing interests: The author has declared that no competing interests exist.
Academic editor: Carloz N. Díaz
Content quality: This paper has been peer-reviewed by at least two reviewers. See scientific committee here
Citation: J. Burgués, M.D. Esclapez, S. Doñate, L. Saúco, S. Marco, 2021, Drone-based environmental odour monitoring: SNIFFDRONE, 9th IWA Odour& VOC/Air Emission Conference, Bilbao, Spain, Olores.org.
Copyright: 2021 Olores.org. Open Content Creative Commons license . It is allowed to download, reuse, reprint, modify, distribute, and / or copy articles in olores.org website, as long as the original authors and source are cited. No permission is required from the authors or the publishers.
ISBN: 978-84-09-37032-0
Keyword: malodours, electronic nose, WWTP, odour mapping, machine learning, drone.
Video
Abstract
Wastewater treatment plants (WWTPs) produce gaseous emissions that might be olfactory annoying to the surrounding population. Current odour assessment methodologies are based on costly and infrequent olfactometry measurements involving human panels, and continuous monitoring of few gases via fixed gas detectors installed on the plant. This leads to odour measurements with low temporal and spatial resolution, hindering an accurate characterization of the odour episodes. The main goal of the SNIFFDRONE project, presented in this paper, is to develop a drone with olfaction capabilities to acquire spatially-dense odour measurements and localize the source of odour nuisances in WWTPs. Such a versatile measurement platform perfectly complements current monitoring technologies, drastically improving plant management. Currently we have a fully operative drone equipped with a hybrid electronic nose comprising 21 chemical sensors from different technologies plus temperature, humidity, and pressure sensors, all of them integrated in a miniature sensing chamber. Machine learning algorithms are used to map the sensor array pattern of response to odour intensity. The electronic nose is mounted in parallel with a remotely controlled sampling system operating under the “lung principle” (EN13725 standard) for obtaining ground truth to calibrate the odour prediction models. The drone also includes a custom sampling and pumping system to avoid downwash effects, GPS receptor, and radio connection to a base station for real-time signal processing and data analysis. The software at the base station allows the estimation of dense odour maps using interpolation algorithms. The system has been calibrated and validated in real operating conditions through several measurement campaigns in the WWTP of Molina de Segura (Murcia, Spain).
-
Introduction
Odours are the main cause of pollution perception, together with dust and noise. In some neighbourhoods, they produce around 60% of air quality complaints (D-NOSES, 2019). Wastewater treatment plants (WWTPs) produce gaseous emissions that might be olfactory annoying to the surrounding population, with a strong impact in the development of key economic sectors such as leisure, tourism, real estate market and in the urban development plans. In fact, housing close to odour sources are 15 % undervalued (Van Broek et al. 2009). The impact of odours in close neighbourhoods depends on many factors, such as odour emission rate, source-receptor distance, meteorological conditions, topography, and individual sensitivity and tolerance (Conti, 2020). Natural odours are complex chemical mixtures of thousands of different compounds that can trigger a human perception. The latter is produced in high neural circuits that is not easily captured by technical means. Human perception, indeed, is a neural construct made based on the raw information provided by about 350 chemical receptor types present in large numbers in the olfactory epithelium (Thomas-Danguin, 2014).
Current odour assessment methodologies use costly and infrequent olfactometry measurements involving human panels and continuous monitoring of few gases using fixed gas detectors installed on the plant. This leads to odour measurements with low temporal and spatial resolutions that do not allow for accurate characterization of the odour emission events. Quantitative and qualitative characterization of odours can only be properly evaluated by sensorial methods involving human panels following standardized protocols (e.g., EN13725:2019 and EN16841:2016). However, these methods require costly, infrequent, and spatially sparse measurements which are insufficient for proper characterization of WWTP emissions. Alternative methods not relying on human panels are mostly based on specific analysers for key odorous compounds, notably H2S, or by gas chromatography analysis. One main problem of these instrumental techniques is that the correlation with the perceived odour intensity can be poor. One of the main challenges of odour characterization in WWTPs is that several odour foci emit simultaneously and with a strong dependency of the local environmental conditions, including seasonal effects.
The technical counterpart of biological olfaction is artificial olfaction, where a chemical sensor array (electronic nose or e-nose) is combined with machine learning algorithms to learn odour classes. Artificial olfaction has obtained promising results in environmental, food quality and medical applications (Karakaya, 2020). In fact, e-noses have been applied to monitor odour emission in WTTPs at fixed locations with good results (Blanco-Rodríguez, 2018). Although few research groups have obtained initial results using terrestrial robots (Monroy. 2018), experiments were limited to academic scenarios with simple operation conditions and high chemical concentrations.
The fast progress in drone technology has ignited new interest in flying chemical sensors (Burgues, 2019). However, up to now the state of the art only reports the use of drones to monitor individual gases (Burgues and Marco, 2020). Few companies, e.g., Scentroid (Montreal) or Aeromon (Finland), currently offer drones fitted with chemical sensors, however with the only intention of monitoring single pollutants, i.e. they do not perform proper odour sensing or any signal or data elaboration beyond data logging. The prediction of odour intensity in flying conditions has not been described yet. Similarly, odour mapping and source localization using drones has not been accomplished or even attempted in realistic scenarios such as WTTPs. The difficulties are daunting: complex time-varying chemical mixtures, low concentrations of key compounds, and meteorological perturbations. Additionally, plume sensing is distorted by turbulence generated by the drone propellers.
The main goal of the SNIFFDRONE project, presented in this paper, is to develop a drone with olfaction capabilities to acquire spatially-dense odour measurements. The drone has an integrated electronic nose with built-in odour prediction models able to cope with different emission sources. This development addressed two main research challenges, namely: (i) the design of an electronic system and machine learning algorithms to predict odour intensity from sensor readings in complex and time-varying gas mixtures, and (ii) to produce maps of time-averaged odour distribution, despite the well-known complexity of concentration distribution in turbulent plumes. While previous research has been based on simplified exploration areas of limited size, absence of obstacles, and uniform wind conditions, this proposal includes field experiments in realistic conditions, i.e. flying over a WWTP for robot development and validation. Several measurement campaigns have been carried out, including four full days of plant monitoring in diverse meteorological conditions. Multivariate predictive models have been validated in blind conditions on the same WWTP in a separate date.
-
Materials and methods
In the framework of the SNIFFDRONE project, a fully operative drone with an integrated hybrid electronic nose has been developed (Fig. 1). The e-nose comprises 21 chemical sensors, plus temperature, humidity, and pressure sensors, in a miniature chamber. Machine learning algorithms are used to map the sensor array pattern of response to odour intensity. A remotely controlled sampling system operating under the “lung principle” (EN13725 standard) is mounted in parallel to the e-nose. In this manner, the contents of the sampling bag are a mirror of the gas composition reaching the sensor chamber. This original approach enables the collection of odour bags for dynamic olfactometry (DO) to provide ground truth for calibrating the machine learning predictive models. Additionally, the drone implements a custom sampling and pumping system to avoid downwash effects, GPS positioning, and a radio connection to a base station for real-time signal processing and data analysis. The software at the base station allows the estimation of dense odour maps using interpolation algorithms.

Fig. 1. Left: Miniaturized sensor chamber hosting 21 chemical sensors, plus temperature, humidity, and pressure sensors. Right: Odour-sensitive drone carrying an electronic nose and an odour sampling device.
The full system has been calibrated and validated in real operating conditions through several measurement campaigns in a WWTP in Molina de Segura, Murcia, Spain. Four measurement campaigns spanning two months were carried out to collect the necessary data to calibrate and validate the e-nose predictions (Table 1). The data collection was focused around the four most odour-intense sources of the WWTP, namely: (a) Settlers stage A, (b) Bioreactors stage A, (c) Deodorisation chimney, and (d) Desander (preliminary treatment). By taking measurements at several distances from these sources, we were able to record the sensor responses in a large odour intensity range spanning five orders of magnitude (10 – 105 ouE/m3). The dataset was composed of 42 samples, each one including the e-nose real-time recordings for one minute and the odour intensity estimated by DO in the same sampling period.
Table 1. Field measurements plan. The value in each cell indicates the number of samples collected.
|
Day |
Settler |
Biological Reactor |
Desander |
Chimney |
Total |
|
24/06/2020 |
3 |
3 |
2 |
2 |
10 |
|
25/06/2020 |
2 |
2 |
2 |
2 |
8 |
|
14/07/2020 |
3 |
3 |
3 |
3 |
12 |
|
15/07/2020 |
3 |
3 |
3 |
3 |
12 |
|
TOTAL |
11 |
11 |
10 |
10 |
42 |
Regarding the e-nose calibration models, Partial Least Squares (PLS) regression is used for odour prediction based on noisy sensor data. Data from three measurement days was used for model calibration, and the remaining day was used for external (blind) validation. The process was repeated four times, changing the validation day to increase the robustness of the estimated model parameters. Feature selection, pre-processing and model complexity were all optimized using internal validation samples in a cross-validation (CV) scheme. The model predictions were validated against blind samples taken in real operational conditions, using as figure of merits the limits of acceptance (LoA) according to Bland-Altman (Bland, 1999), and the root mean squared error in prediction (RMSEP).
-
Results and discussion
The first result of this project is a fully operative drone that can predict the odour intensity of ambient air samples in real-time and collect samples for post-flight laboratory (olfactometric) analysis. Since any chemical measurement system must be calibrated under similar conditions to those expected in the operational scenario, we calibrated the e-nose using data acquired by the drone at selected emission sources of a WWTP. Models based on four sensors, and logarithmic transformations of X (regressor matrix) and y (response vector) yielded the best results. The predictions of external validation samples (i.e. not seen during calibration) showed no bias and good correlation (ρ=0.86) with the reference olfactometric values (Fig. 2). The four emission sources considered by the model are predicted with similar accuracy. The RMSEP is 1.98 (ratio) and the LOA are [0.25x, 3.91x] with a 95% confidence. Although these limits are a factor of two wider than those of dynamic olfactomety ([0.5x, 2x]), this mild degradation in accuracy is more than offset by the cost reduction and the increase in spatial and temporal resolution of drone-based measurements.

Fig. 2. Drone based odour estimation compared with Dynamic Olfactometry in external validation samples. The marker colour indicates the odour source. The ideal prediction line (1:1) and the upper and lower limits of acceptance (LoA) are shown. LoA and RMSEP values are provided as factors (ratios).
After the e-nose was calibrated, the drone was flown over the entire plant to map the odour intensity. This flight was performed at low speed (limited by the response time of the sensors) and low altitude, i.e. with the inlet of the sampling tube at few meters above the ground or the emission sources. The geolocalized measurements were converted to odour concentration and interpolated using a triangular method to produce a smooth map (Fig. 3). As expected, the highest odour emissions were concentrated around the primary treatment elements (left side of the plant in the figure), such as the deodorisation chimney, the bioreactors, and the settlers stage A. The right side of the plant is less odorous, as it contains secondary treatment elements that treat cleaner wastewater that has been already pre-treated.
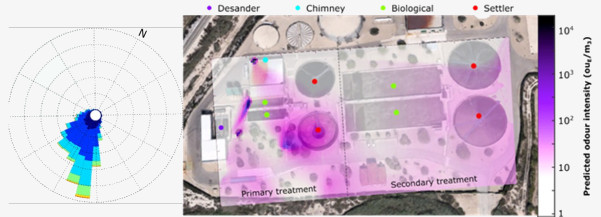
Fig. 3 Interpolated odour concentration map based on the measurements taken by the drone during a survey of the plant. Wind was measured with an in-situ anemometer placed al 10 m a.g.l.
The map also shows how the wind disperses the odour from the primary treatment sources to the south of the plant. These emissions may extend outside of the plant and can potentially reach nearby populations, as it exceeds 5 ouE·m-3 in part of the plant perimeter, which is the highest limit currently accepted by some public authorities in their public tenders in Spain (Consorcio de Aguas Bilbao Bizkaia, 2019).
-
Conclusions
SNIFFDRONE project has addressed two main open research challenges: (i) the design of an electronic system and machine learning algorithms to predict odour intensity from sensor readings in complex and time-varying gas mixtures, and (ii) to produce maps of time-averaged odour distribution, despite the well-known complexity of concentration distribution in turbulent plumes. The interpolated odour maps from drone-based readings are a novel and effective way of characterizing the odour emissions within the plant perimeter, providing key information not easily available by other technical means. Thus, this type of map is highly informative for plant managers, which can take the appropriate odour abatement actions. It should be noted that the characterization of odorous emissions, including monitoring their evolution over time, is a requirement imposed by various administrations in their tenders for the operation of WWTPs. The developed system may also help to identify diffuse emission sources, and detect failures or malfunctions of deodorization systems. Furthermore, the data collected by the drone could be used as input for atmospheric dispersion and transport (ATD) models to predict odour impact outside of the plant. Because of the importance of the challenges addressed in this project, SNIFFDRONE represents a significant leap forward in the field of olfactory robotics, which up to now has focused on the use of terrestrial robots for single-odorant chemical sensing in relatively simple scenarios.
The potential demonstrated by SNIFFDRONE´s preliminary prototype encourages its further development until reaching a pre-commercial stage. More validation tests are required for fine-tuning of the algorithms and scaling up the technology to a pre-industrial product achieving TRL 8 (system complete and qualified).
-
Acknowledgement
We would like to acknowledge, the Departament d’Universitats, Recerca i Societat de la Informacio de la Generalitat de Catalunya (expedient 2017 SGR 1721); the Comissionat per a Universitats i Recerca del DIUE de la Generalitat de Catalunya; and the European Social Fund (ESF). Additional financial support has been provided by the Institut de Bioenginyeria de Catalunya (IBEC). IBEC is a member of the CERCA Programme/Generalitat de Catalunya.
Authors gratefully acknowledge Entidad de Saneamiento y Depuración de Aguas Residuales de la Región de Murcia (ESAMUR) for the interest and collaboration.
This project has received funding from the ATTRACT project funded by the EC under Grant Agreement 777222.
-
References
Blanco-Rodríguez, A., Camara, V.F., Campo, F., Becherán, L., Durán, A., Vieira, V.D. et al. 2018 Development of an electronic nose to characterize odours emitted from different stages in a wastewater treatment plant. Water Res., 134, 92–100.
Bland, J.M. and Altman, D.G. 1999. Measuring agreement in method comparison studies. Stat. Methods Med. Res. p. 135–60.
Burgués J, Hernández V, Lilienthal AJ, Marco S. 2019. Smelling nano aerial vehicle for gas source localization and mapping. Sensors, 19(3), 478.
Burgués J, Marco S. 2020. Environmental chemical sensing using small drones: A review. Sci. Total Environ. 2020 Jul 25:141172.
Consorcio de Aguas Bilbao Bizkaia (2019), Redacción del proyecto, ejecución de obra y explotación de la ampliación de la estación depuradora de aguas residuales de Muskiz. Anejo 13. Garantías exigidas rev. 2
https://www.euskadi.eus/w32-kpeperfi/es/v79aWar/comunJSP/v79aObtenerFichero.do;jsessionid=-_Mhh6_ITtnfHM1roKnW_PJPS1OhYxV0nBYI9UCD394jdKpnijGO!1913816893!-46031597?identificador=142149&idTabla=030&R01HNoPortal=true (accessed on: 14/04/2021)
Conti, C., Guarino, M. and Bacenetti, J. 2020. Measurements techniques and models to assess odor annoyance: A review. Environ. Int., 134, 105261.
D-NOSES Project consortium. (2019) Odour Pollution: A growing societal concern. D-Noses Policy Brief #1.
https://dnoses.eu/wp-content/uploads/2019/03/Policy-Brief_-Digital-A4-Europe_EN.pdf (accessed on: 09/04/2021)
Karakaya, D., Ulucan, O., Turkan, M. 2020. Electronic Nose and Its Applications: A Survey. Int. J. Autom. Comput. 17, 179–209.
Monroy J., Gonzalez-Jimenez J. 2018. Chap: Towards Odor-Sensitive Mobile Robots. In: Electronic Nose Technologies and Advances in Machine Olfaction. Edited by Yousif Abdullatif Albastaki, and Fatema Albalooshi, 244-263.
Thomas-Danguin, T., Sinding, C., Romagny, S., El Mountassir, F., Atanasova, B., Le Berre, E. et al. 2014. The perception of odor objects in everyday life: a review on the processing of odor mixtures. Front. Psychol., 5, 1–18.
Van Broeck, G., Bogaert, S., De Meyer, L. 2009. Monetary valuation of odour nuisance as a tool to evaluate cost effectiveness of possible odour reduction techniques, in 3rd IWA International Conference on Odour and VOCs, Barcelona, Spain, 8 - 10 October.